La mise au point (MAP) automatique était l’un des derniers points à régler afin de finalement pouvoir tout automatiser à l’observatoire. Pour faire un vrai autofocus il est presque impératif d’utiliser un système à positionnement absolu, à base de moteur pas à pas. Plusieurs solutions à positionnement absolu existent, la plus connue étant sûrement celle commercialisée par Robofocus. Ce modèle est cependant très cher et sa connectique me semble un peu vieillissante ! Je me suis donc orienté sur un autre modèle, plus abordable, proposé par la société Lunatico : le Seletek Armadillo.

Par rapport à d’autres marques proposées au même tarif, ce modèle présente notamment l’avantage de pouvoir piloter deux moteurs de MAP en simultané, de gérer la compensation de température et d’être évolutif.

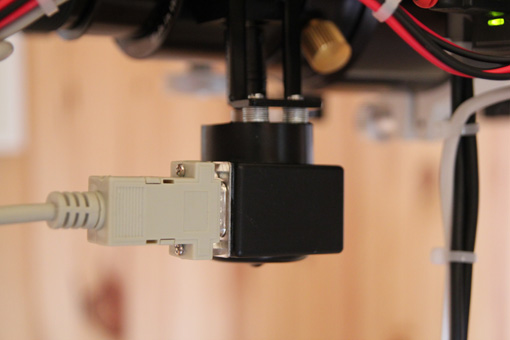
Le boitier de contrôle est très léger et j’ai décidé de le coller à la roue à filtre à l’aide d’un double-face très résistant et ne laissant aucune trace.

Le boitier se connecte à l’ordinateur à l’aide d’un câble USB 2.0 et s’alimente en 12V. Les moteurs se branchent avec des câbles série (DB9). Pour l’instant je n’utilise qu’un seul moteur mais le second sera prochainement installé.


Les moteurs pas à pas sont de très bonne facture et leur résolution semble identique aux moteurs offerts par robofocus. Les premiers essais à partir de MaximDL sont très concluants. Le système m’a en effet permis de passer pour la première fois sous la barrière de 1.4 de FWHM. Avec mon équipement précédent (Orion Accufocus et interface Shoestring Astronomy) je n’étais jamais parvenu à descendre en dessous de 1.8.

Le mauvais temps de ces dernières semaines ne m’a pas permis d’approfondir mes essais. Dès que le beau temps reviendra j’écrirai un article complet à ce sujet.